Agencies coordinating the ongoing search efforts are planning to suspend operations once a thorough exploration of the established search zone is completed, unless credible new evidence for a specific location is presented. This hydroacoustic analysis project continues to reveal candidate events as new algorithms and data visualization methods are developed. The recent focus has been on 7th Arc timing for an impact event near the active search area to provide even preliminary results before operations are suspended.
Signal Analysis Methods
Because cross correlation of acoustic signals only works well at short distances and low frequencies, other methods of finding coherence matches between distant hydrophones have been explored. Over a dozen different algorithms have been tried, taking advantage of the triad arrays at Cape Leeuwin (CTBTO array H01W) and Diego Garcia (CTBTO H08S). Beamforming is used to significantly improve signals in a specific direction. It is the basis of 4G mobile phone antenna technology and phased array radar. Delay of the arriving acoustic signals according to hydrophone placement and local sound speed were described in a previous report for visualizing the back azimuth bearing to a sound source amid noise.
Beamforming techniques can also be used to null out noise sources from particular directions. Any useful detections from the Diego Garcia H08 array recordings were initially considered to be completely obliterated by seismic survey ships making repetitive strong concussive impulses at 8-12 second intervals during the time frame of interest. Beamformed nulling has been effective in revealing other H08 signals.
Detection at frequencies outside the main 5-30 Hz band of the survey noise sources has been somewhat effective. Very low frequencies are likely to originate from a larger source, including seismic origin but also ice events. Inclusion of high frequencies, even beyond the nyquist sampling rate which would contain complex signal aliasing components, has generated unique detections despite the survey noise corruption.
Another approach has been the use of coherence methods that are less susceptible to stronger off-axis sources. Using hilbert transform methods it is possible to ignore the intensity component of a signal, not unlike the way a discriminator detects an FM radio signal. Another novel method that utilizes the full frequency range is to match normalized autocorrelation results for each signal. This is comparable to speech detection which uses signature pattern matching, but with the advantage of having a continuous reference pattern signal on each of the hydrophones, only skewed in time.
Coherence Visualization
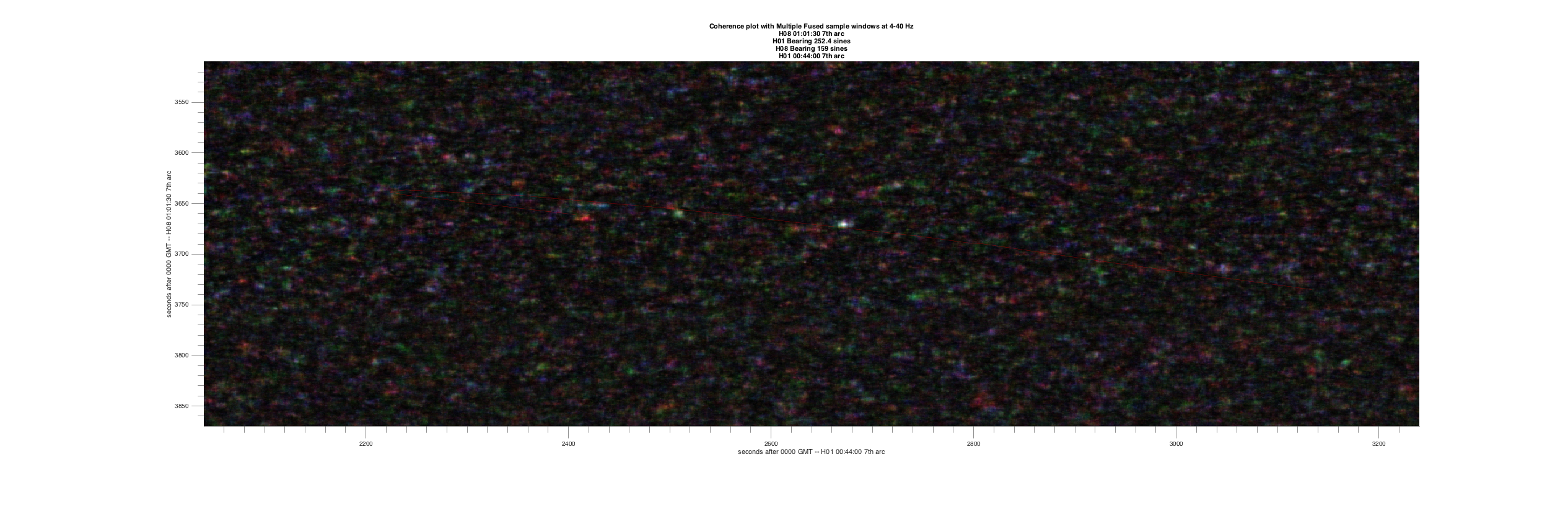
The detection algorithm development was initially visualized using a simple plot of coherence as intensity with time progressing on each axis. This is natural for displaying TDOA (Time Difference of Arrival). The result is a diagonal timeline passing through possible locations, with bearing resolution that improves with broader frequencies and wider analysis windows. That bearing resolution far exceeds the accuracy of the hydrophone placement and modeled wave speeds, and a broader coherence window also blurs timing accuracy.
Converting the results of a TDOA event detection into a plotted map location was a slow process requiring manual calculations and interpolations based on nearby profiled wave speeds. This was also fraught with the sometimes large geodesic (great circle distance) calculation errors inherent in most mapping and generalized math tools.
The TDOA plots were also counterintuitive due to the spatial arrangement of the 7th Arc in relation to the hydrophone locations. The geostationary Inmarsat satellite is over the equator not far west of Diego Garcia, at the center of the 7th Arc radius. As the 7th Arc is defined by the estimated impact time, this means a relatively narrow range of arrival times at Diego Garcia coming from anywhere along the arc. The Cape Leeuwin hydrophone is on the opposite side of the arc. The broader distance range to the arc makes for a wider arrival time range.
Due to having only two hydrophone locations and their placement, arrival times alone are mirrored from the northern to southern portions of the arc, symmetric around a great circle line between the hydrophones, and nearly perpendicular to the 7th arc. When the 7th arc is plotted onto a TDOA display for spatial reference, it confusingly loops back on itself.
A Change of Approach
The somewhat obvious solution getting more intuitive results was to use the underlying data to generate more accurate coherence intensity maps on orthogonal lat/lon coordinates. These are easily imported as image overlays into Google Earth then exported as .kmz files.
Generating the maps requires several optimizations, because the iterative geodesic calculations alone for every pixel would take an excessive amount of time even with a fast CPU. The geodesics are instead computed for a grid of points encompassing the map area, and a polynomial 3D surface is fitted to the data. The same approach is used for determining signal propagation times. The speed of sound (aka Group Velocity or Wave Speed) at several points along the 7th Arc and other key locations were carefully profiled by using a standard formula based on temperature+depth+salinity to find the SOFAR sound minimum at points over a path to each hydrophone, then integrated into single wavespeed values. A polynomial surface is then fitted to the wavespeed sample locations for each hydrophone. (A future improvement would be to model SOFAR wavespeeds from the gridded World Ocean Atlas data directly for the entire hemisphere).
Initial Results
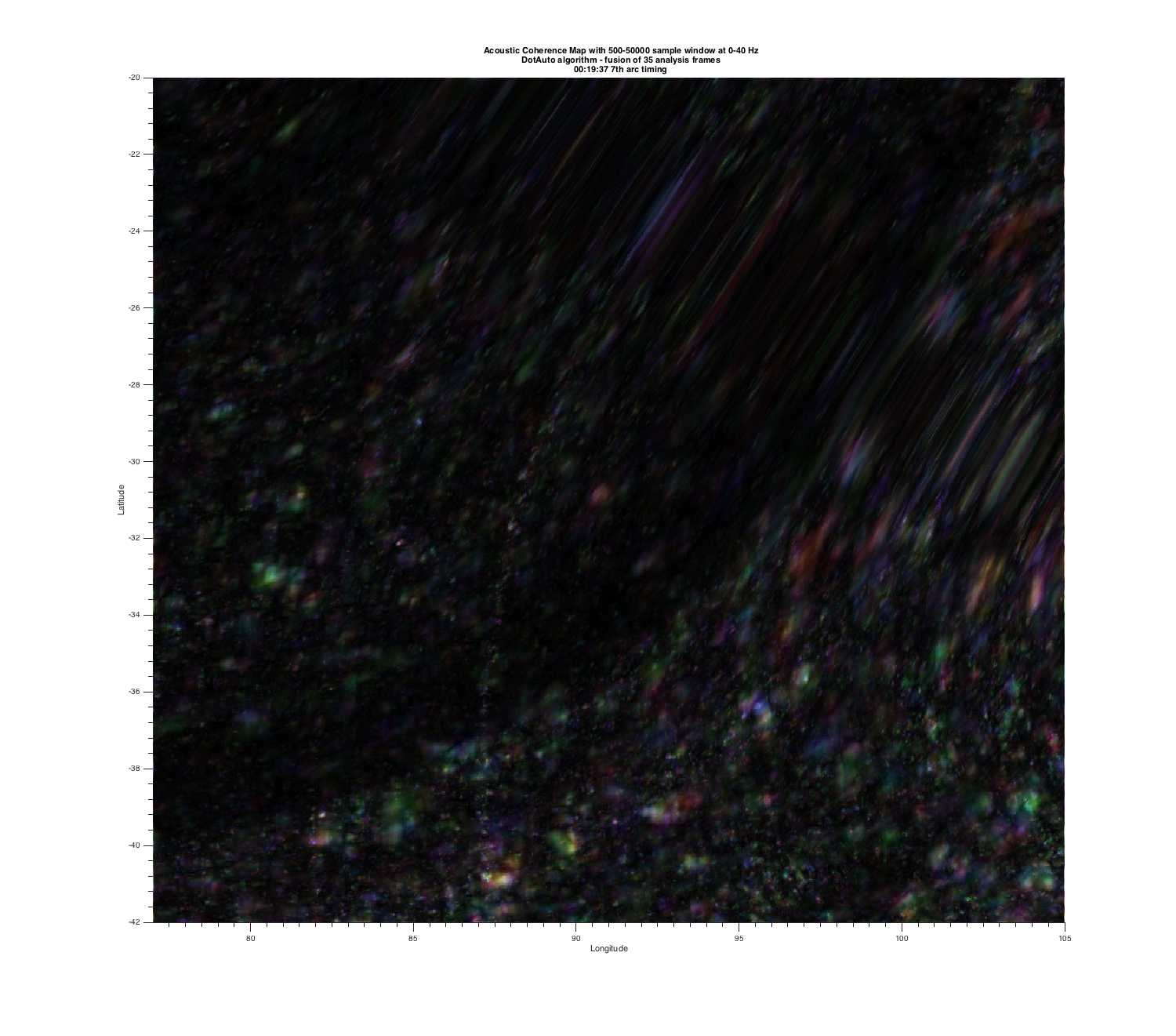
The first potentially useful acoustic map result was sent October 19 to the ATSB search team. It is based on the matched autocorrelation “DotAuto” algorithm, which combines dot products of the individual triad elements without precise beamforming methods. DotAuto also displays different results depending on the time window aperture. This was partly overcome by generating a 35 frame stack (with NIH ImageJ+Fiji) of different analysis results using window sizes from 500 to 50K samples (2 to 200 seconds). The stack was then fused into a single map image by summing all frames with their standard deviation included for better detail.
This map is available for download here as a .kmz file plus the underlying 35 analysis frames in .avi movie file format.
The band of smeared pixels is on the great circle path between the hydrophone locations. The darker diagonal arc represents the brief fadeout of one seismic survey noise source at H08. It is just NW of the 7th arc. Please refer to the .kmz image file map overlay, using a previous .kmz release that includes 7th arc references.
For context, a broader map is presented using the same algorithm, but covering nearly the entire hemisphere.

The mirror symmetry is more obvious, noting that it occurs over land mass areas. It is not an exact mirror image, as the calculations also take into account sound speed variations. The broader map will be inaccurate beyond the profiled wave speeds around the 7th arc. The sounds speeds are extrapolated outside that region, limiting the hemisphere map accuracy to its use for spotting any conflicting signal sources. This map analysis shows a single 90 second window aperture.
A caveat for both maps is that the frequency band shown as 0-40Hz on the figures is not quite accurate. An attempt at incorporating frequencies below 2 Hz used a notch filter at 0 Hz to reject DC components, but it was misconfigured. Frequencies from 40-120 Hz are rejected, but the errant filter was amplifying the aliased signals from 125-250 Hz, which also strongly amplified very low frequencies. A broad FFT spectral analysis of the acoustic signals shows a consistent low frequency peak around 0.35 Hz, which may propagate well in the SOFAR channel. There is evidence that such low frequency waves travel more slowly as Acoustic Gravity Waves. A derivation based on one report is a speed about 96% of normal group velocity at 0.35 Hz.
Another caution on interpretation is that repeated signals along the same radius are likely to be phantoms of the strongest signal on that arc. The seismic survey noise also appears as rings at multiple radii, because of the repeating signals.
A Prominent Candidate
Of particular note on the 7th Arc map is a bright coherence match around S41 E88. The map represents signal locations timed for 00:19:37 UTC, corresponding to locations for an impact at 7th arc timing only. A later impact would move the candidate along a 28.3 degree path (midway between tangents to the two hydrophone radii) toward the 7th arc, intersecting it at about +150 seconds. Taking into account the possibility of slower low frequency arrivals, a 96% wave speed would also move the signal about halfway toward the 7th arc intersection on the same 28.3 degree search bearing. The 28.3 degree search path from S41 E88 is consistent with either time shift.
Bright areas appear near the acoustic candidate sites suggested in August. Other detections using various algorithms have shown clusters of weak events associated with the brighter locations, but itemizing them would be broadening the search rather than narrowing it to select few candidates. The symmetry to the northern portion of the 7th arc indicates possible candidate areas that are being explored further, as drift analysis indicates a shift in that direction.
Conclusion
This is a late summary written two weeks after the preliminary release to ATSB. There have been more developments in that time. Beamformed nulling is now working for multiple signal rejection and can be used as a general prefilter. Beamforming minimizes the ambiguity of the time arrival symmetry, and new algorithms plus a recalibration of the hydrophone locations are bringing more accurate results.